.jpg)
.jpg)
.jpg)
.jpg)
Гібрыдны крокавы рухавік Nema 8 (20 мм), біпалярны, 4-вывадны, ходавы вінт ACME, нізкі ўзровень шуму, працяглы тэрмін службы, высокая прадукцыйнасць
Гібрыдны крокавы рухавік Nema 8 (20 мм), біпалярны, 4-вывадны, ходавы вінт ACME, нізкі ўзровень шуму, працяглы тэрмін службы, высокая прадукцыйнасць
Гэты 20-міліметровы гібрыдны крокавы рухавік даступны ў трох тыпах: з знешнім прывадам, праз вось і праз фіксаваную вось. Вы можаце выбраць у адпаведнасці з вашымі канкрэтнымі патрэбамі.
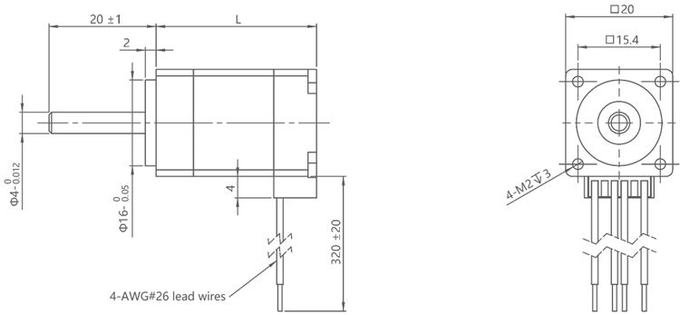
Стандартны чарцёж контуру знешняга рухавіка VSM20HSM:
Апісанні
| Назва прадукту | 20-міліметровыя гібрыдныя крокавыя рухавікі з вонкавым прывадам |
| Мадэль | VSM20HSM |
| Тып | гібрыдныя крокавыя рухавікі |
| Кут кроку | 1,8° |
| Напружанне (В) | 2,5 / 6,3 |
| Ток (А) | 0,5 |
| Супраціўленне (Ом) | 5.1 / 12.5 |
| Індуктыўнасць (мГн) | 1,5 / 4,5 |
| Падводныя правады | 4 |
| Крутоўны момант (Нм) | 0,02 / 0,04 |
| Даўжыня рухавіка (мм) | 30 / 42 |
| Тэмпература навакольнага асяроддзя | -20℃ ~ +50℃ |
| Павышэнне тэмпературы | Максімум 80 тыс. |
| Электрычная трываласць | 1 мА макс. пры 500 В, 1 кГц, 1 сек. |
| Супраціўленне ізаляцыі | 100 МОм мін. пры 500 В пастаяннага току |
Сертыфікаты

Электрычныя параметры:
| Памер рухавіка | Напружанне/ Фаза (В) | Бягучы/ Фаза (А) | Супраціў/ Фаза (Ω) | Індуктыўнасць/ Фаза (мГн) | Колькасць Падводныя правады | Інерцыя ротара (г·см2) | Крутоўны момант утрымання (Нм) | Даўжыня рухавіка L (мм) |
| 20 | 2,5 | 0,5 | 5.1 | 1,5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12,5 | 4.5 | 4 | 3 | 0,04 | 42 |
Агульныя тэхнічныя параметры:
| Радыяльны зазор | 0,02 мм макс. (нагрузка 450 г) | Супраціўленне ізаляцыі | 100 МОм пры 500 В пастаяннага току |
| Восевы зазор | 0,08 мм макс. (нагрузка 450 г) | Электрычная трываласць | 500 В пераменнага току, 1 мА, 1 с пры 1 кГц |
| Максімальная радыяльная нагрузка | 15 Н (20 мм ад паверхні фланца) | Клас ізаляцыі | Клас B (80 тыс.) |
| Максімальная восевая нагрузка | 5N | Тэмпература навакольнага асяроддзя | -20℃ ~ +50℃ |
Характарыстыкі шрубы:
| Дыяметр шрубы (мм) | Шат (мм) | Крок (мм) | Сіла самафіксацыі пры выключэнні харчавання (Н) |
| 3.5 | 0,6096 | 0,003048 | 80 |
| 3.5 | 1 | 0,005 | 40 |
| 3.5 | 2 | 0,01 | 10 |
| 3.5 | 4 | 0,02 | 1 |
| 3.5 | 8 | 0,04 | 0 |
Крывая крутоўнага моманту і частаты
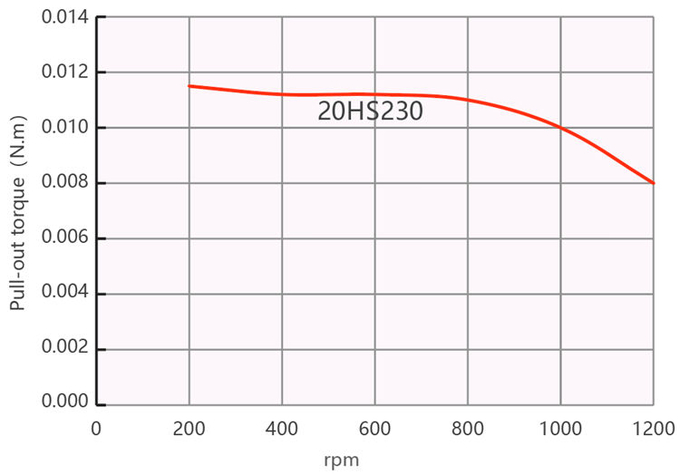
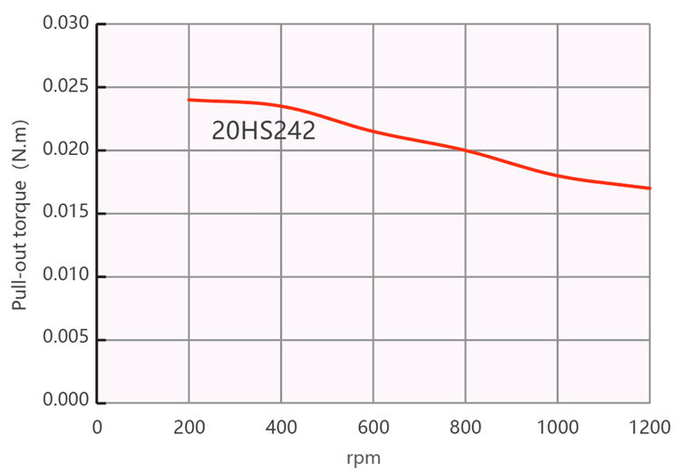
Умова тэставання:
Прывад перарывальніка, паўмікракрокавы, напружанне прывада 24 В
Сферы прымянення
3D-друк:20-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца для кіравання рухам у 3D-прынтарах, каб прыводзіць у рух друкавальную галоўку, стальніцу і сістэму восевага руху.
Абсталяванне аўтаматызацыі: Гэтыя крокавыя рухавікі звычайна выкарыстоўваюцца ў абсталяванні аўтаматызацыі, такім як аўтаматычныя ўпаковачныя машыны, аўтаматычныя зборачныя лініі, аўтаматычныя рабатызаваныя маніпулятары і г.д., для кантролю дакладнага становішча і хуткасці.
Робататэхніка:У галіне робататэхнікі 20-міліметровыя гібрыдныя крокавыя рухавікі выкарыстоўваюцца для кіравання рухамі суставаў робатаў для дакладнага кантролю становішча і пазіцыі.
Станкі з ЧПУ:Гэтыя крокавыя рухавікі таксама выкарыстоўваюцца ў станках з ЧПУ для кіравання дакладнымі рухамі інструментаў або сталоў для высокадакладнай апрацоўкі.
Медыцынскае абсталяванне:У медыцынскім абсталяванні 20-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца для дакладнага кіравання рухам кампанентаў медыцынскага абсталявання, такіх як хірургічныя робаты і сістэмы дастаўкі лекаў.
Аўтамабільнае абсталяванне:У аўтамабільнай прамысловасці гэтыя крокавыя рухавікі могуць выкарыстоўвацца для кіравання становішчам і рухам аўтамабільных кампанентаў, такіх як сістэмы пад'ёму і апускання шклопад'ёмнікаў, сістэмы рэгулявання сядзенняў і гэтак далей.
Разумны дом:У галіне разумнага дома 20-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца для кіравання адкрыццём і закрыццём штор, паваротам камер у сістэмах хатняй бяспекі і г.д.
Гэта толькі некаторыя з распаўсюджаных абласцей прымянення 20-міліметровых гібрыдных крокавых рухавікоў. Фактычна, крокавыя рухавікі маюць шырокі спектр прымянення ў розных галінах прамысловасці і сферах. Канкрэтныя сцэнарыі выкарыстання таксама залежаць ад іх канкрэтных характарыстык, патрабаванняў да прадукцыйнасці і кіравання.
Перавага
Дакладнасць і магчымасці пазіцыянавання:Гібрыдныя крокавыя рухавікі забяспечваюць высокую дакладнасць і магчымасці пазіцыянавання для тонкіх крокавых рухаў, часта з малымі кутамі кроку, такімі як 1,8 градуса або 0,9 градуса, што прыводзіць да больш дакладнага кантролю становішча.
Высокі крутоўны момант і высокая хуткасць:Гібрыдныя крокавыя рухавікі маюць канструктыўныя характарыстыкі, якія забяспечваюць высокі крутоўны момант і, пры правільным падборы драйвера і кантролера, высокую хуткасць. Гэта робіць іх прыдатнымі для прымянення, якія патрабуюць як высокага крутоўнага моманту, так і руху з высокай хуткасцю.
Кіраванасць і праграмуемасць:Гібрыдныя крокавыя рухавікі — гэта сістэма кіравання з разамкнутым контурам і добрай кіравальнасцю. Кантролер можа дакладна кіраваць імі на кожным кроку руху, што прыводзіць да высока праграмуемых і кіраваных паслядоўнасцей руху.
Простае кіраванне і кіраванне:Гібрыдныя крокавыя рухавікі маюць адносна простую схему кіравання і прывада ў параўнанні з іншымі тыпамі рухавікоў. Яны не патрабуюць выкарыстання прылад зваротнай сувязі па становішчы (напрыклад, энкодэраў) і могуць кіравацца непасрэдна адпаведнымі драйверамі і кантролерамі. Гэта спрашчае праектаванне і ўстаноўку сістэмы і зніжае выдаткі.
Высокая надзейнасць і стабільнасць:Гібрыдныя крокавыя рухавікі забяспечваюць высокую надзейнасць і стабільнасць дзякуючы сваёй простай канструкцыі, невялікай колькасці рухомых дэталяў і бесшчоткавай канструкцыі. Яны не патрабуюць рэгулярнага тэхнічнага абслугоўвання, маюць працяглы тэрмін службы і забяспечваюць стабільную працу пры правільным выкарыстанні і эксплуатацыі.
Энергаэфектыўнасць і нізкі ўзровень шуму:Гібрыдныя крокавыя рухавікі энергаэфектыўныя, забяспечваючы высокі крутоўны момант пры адносна нізкай магутнасці. Акрамя таго, яны звычайна працуюць з нізкім узроўнем шуму, што дае ім перавагу ў прымяненні, адчувальным да шуму.
Патрабаванні да выбару рухавіка:
►Кірунак руху/мантажу
►Патрабаванні да нагрузкі
►Патрабаванні да інсульту
►Патрабаванні да апрацоўкі тарцоў
►Патрабаванні да дакладнасці
►Патрабаванні да зваротнай сувязі энкодэра
►Патрабаванні да ручной карэкціроўкі
►Патрабаванні да навакольнага асяроддзя
Вытворчая майстэрня



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)