.jpg)
.jpg)
.jpg)
.jpg)
Гібрыдны крокавы рухавік Nema 34 (86 мм), біпалярны, 4-вывадны, ходавы вінт ACME, нізкі ўзровень шуму, працяглы тэрмін службы, для медыцынскага абсталявання
Апісанне
Гэты 86-міліметровы гібрыдны крокавы рухавік даступны ў трох тыпах: з знешнім прывадам, праз вось і праз фіксаваную вось. Вы можаце выбраць у адпаведнасці з вашымі канкрэтнымі патрэбамі.
Крокавы рухавік ACME з ходавым шрубай пераўтварае вярчальны рух у лінейны з дапамогай ходовага шрубы; ходавы шруба мае розныя камбінацыі дыяметра і кроку, каб задаволіць розныя патрабаванні прымянення.
Крокавы рухавік з хадавым шрубам звычайна выкарыстоўваецца ў прыладах, якія патрабуюць дакладнага лінейнага руху, нізкага ўзроўню шуму і высокай эканамічнасці, такіх як медыцынскае абсталяванне, тэлекамунікацыйныя прылады і г.д.
ThinkerMotion прапануе поўны асартымент крокавых рухавікоў з хадавым вінтом (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) з дыяпазонам нагрузкі ад 30 Н да 2400 Н, даступныя 3 тыпы (знешні, з фіксацыяй, без фіксацыі). Па запыце могуць быць зроблены змены, такія як даўжыня і канец шрубы, магнітны тормаз, энкодэр, гайка з антызваротным ходам і г.д.; па запыце хадавы шруба таксама можа быць пакрыты тэфлонам.

Апісанні
| Назва прадукту | 86-міліметровыя гібрыдныя крокавыя рухавікі |
| Мадэль | VSM86HSM |
| Тып | гібрыдныя крокавыя рухавікі |
| Кут кроку | 1,8° |
| Напружанне (В) | 3/4.8 |
| Ток (А) | 6 |
| Супраціўленне (Ом) | 0,5/0,8 |
| Індуктыўнасць (мГн) | 4/8,5 |
| Падводныя правады | 4 |
| Даўжыня рухавіка (мм) | 76/114 |
| Тэмпература навакольнага асяроддзя | -20℃ ~ +50℃ |
| Павышэнне тэмпературы | Максімум 80 тыс. |
| Электрычная трываласць | 1 мА макс. пры 500 В, 1 кГц, 1 сек. |
| Супраціўленне ізаляцыі | 100 МОм мін. пры 500 В пастаяннага току |
Сертыфікаты

Электрычныя параметры:
| Памер рухавіка | Напружанне /Фаза (В) | Бягучы /Фаза (А) | Супраціў /Фаза (Ω) | Індуктыўнасць /Фаза (мГн) | Колькасць Падводныя правады | Інерцыя ротара (г·см2) | Вага рухавіка (г) | Даўжыня рухавіка L (мм) |
| 86 | 3 | 6 | 0,5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0,8 | 8,5 | 4 | 2500 | 5000 | 114 |
Тэхнічныя характарыстыкі і параметры прадукцыйнасці хадавога шрубы
| Дыяметр (мм) | Свінец (мм) | Крок (мм) | Сіла самафіксацыі пры выключэнні харчавання (Пн.) |
| 15.875 | 2,54 | 0,0127 | 2000 год |
| 15.875 | 3.175 | 0,015875 | 1500 |
| 15.875 | 6.35 | 0,03175 | 200 |
| 15.875 | 12.7 | 0,0635 | 50 |
| 15.875 | 25,4 | 0,127 | 20 |
Заўвага: Каб атрымаць больш падрабязную інфармацыю аб хадавых шрубах, звяжыцеся з намі.
Стандартны чарцёж контуру знешняга рухавіка VSM86HSM
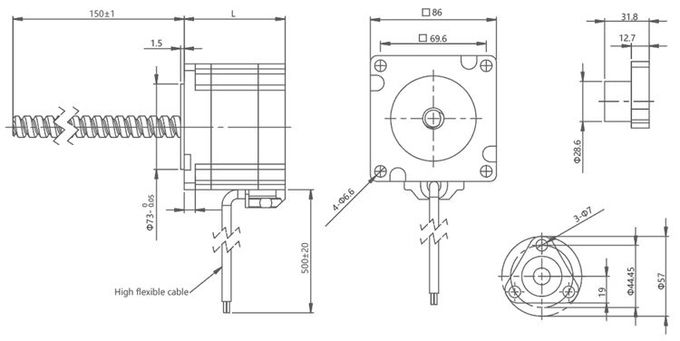
Заўвагі:
Даўжыня шрубы можа быць настроена
Магчымая індывідуальная апрацоўка канца хадавога шрубы
86-міліметровы гібрыдны крокавы рухавік стандартнага контурнага чарцяжа ўбудаваных рухавікоў:
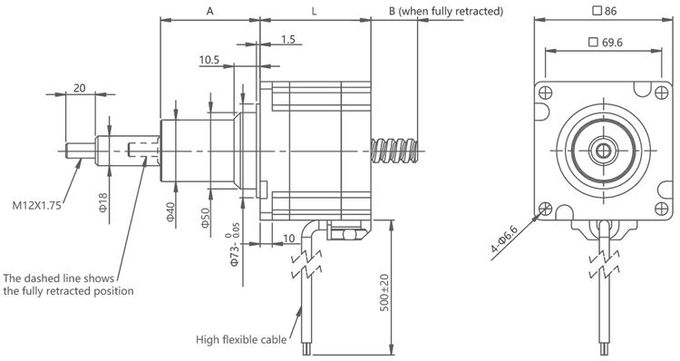
Заўвагі:
Магчымая індывідуальная апрацоўка канца хадавога шрубы
| Інсульт S (мм) | Памеры А (мм) | Памер B (мм) | |
| Л = 76 | Л = 114 | ||
| 12.7 | 29,7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25,4 | 42,4 | 8.4 | 0 |
| 31,8 | 48,8 | 14,8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50,8 | 67,8 | 33,8 | 0 |
| 63,5 | 80,5 | 46,5 | 8,5 |
86-міліметровы гібрыдны крокавы рухавік, стандартны скразны контурны чарцёж рухавіка
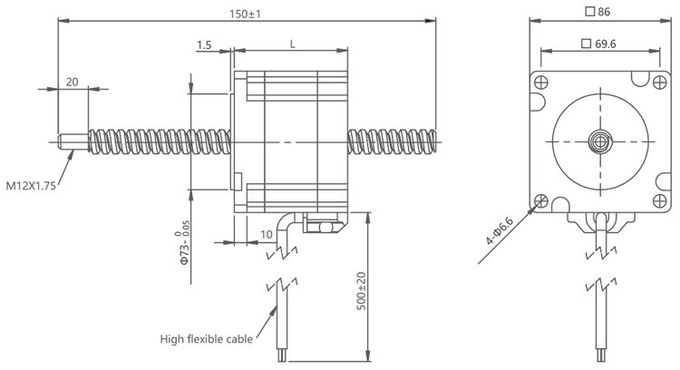
Заўвагі:
Даўжыня шрубы можа быць настроена
Магчымая індывідуальная апрацоўка канца хадавога шрубы
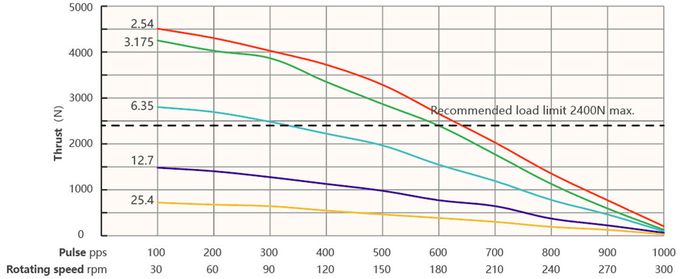
Крывая хуткасці і цягі:
86-я серыя, даўжыня рухавіка 76 мм, біпалярны прывад Chopper
100% частата імпульсаў току і крывая цягі (хадавы шруба Φ15,88 мм)
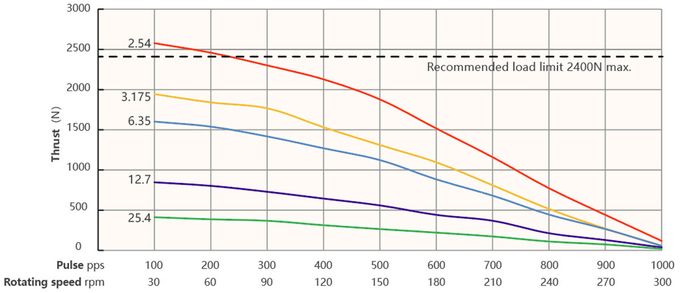
86-я серыя, даўжыня рухавіка 114 мм, біпалярны прывад Chopper
100% частата імпульсаў току і крывая цягі (хадавы шруба Φ15,88 мм)
| Шаг (мм) | Лінейная хуткасць (мм/с) | |||||||||
| 2,54 | 1.27 | 2,54 | 3.81 | 5.08 | 6.35 | 7.62 | 8,89 | 10.16 | 11.43 | 12.7 |
| 3.175 | 1,5875 | 3.175 | 4,7625 | 6.35 | 7,9375 | 9.525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6.35 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25,4 | 28.575 | 31,75 |
| 12.7 | 6.35 | 12.7 | 19.05 | 25,4 | 31,75 | 38.1 | 44,45 | 50,8 | 57,15 | 63,5 |
| 25,4 | 12.7 | 25,4 | 38.1 | 50,8 | 63,5 | 76,2 | 88,9 | 101,6 | 114,3 | 127 |
Умова тэставання:
Прывад перарывальніка, без нарастання хуткасці, паўмікракрокавы рэжым, напружанне прывада 40 В
Сферы прымянення
Станкі з ЧПУ:86-міліметровыя гібрыдныя крокавыя рухавікі шырока выкарыстоўваюцца ў станках з ЧПУ для кіравання рухам і становішчам рэжучых інструментаў для рэалізацыі высокадакладных аперацый апрацоўкі.
Абсталяванне для аўтаматызацыі:86-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца ў розным абсталяванні аўтаматызацыі, такім як аўтаматычныя упаковачныя машыны, аўтаматычныя сістэмы сартавання, аўтаматызаваныя вытворчыя лініі і г.д., для кіравання рухам і пазіцыянаваннем.
3D-друк:У галіне 3D-друку выкарыстоўваюцца 86-міліметровыя гібрыдныя крокавыя рухавікі для кіравання становішчам і рухам друкавальнай галоўкі, што дазваляе рэалізаваць дакладныя аперацыі друку.
Медыцынскія прылады:86-міліметровыя гібрыдныя крокавыя рухавікі шырока выкарыстоўваюцца ў медыцынскіх прыладах, такіх як медыцынскія шпрыцавыя помпы, медыцынскія робаты, медыцынскае сканавальнае абсталяванне і г.д., для дакладнага кантролю становішча і руху.
Тэлекамунікацыйнае абсталяванне:86-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца для дакладнага пазіцыянавання і кіравання ў тэлекамунікацыйным абсталяванні, такім як сістэма пазіцыянавання антэн сувязі, дакладнае кіраванне валаконна-аптычным абсталяваннем.
Тэкстыльныя машыны:У тэкстыльнай прамысловасці 86-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца для кіравання прадзільнымі машынамі, ткацкімі станкамі і іншым абсталяваннем, каб забяспечыць дакладнасць і стабільнасць тэкстыльнага працэсу.
Робататэхніка:86-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца ў розных робататэхнічных прыладах, у тым ліку ў прамысловых робатах, сэрвісных робатах, калабаратыўных робатах і г.д., для дакладнага руху і працы.
Аўтаматызаваныя складскія сістэмы:У аўтаматызаваных складскіх і лагістычных сістэмах 86-міліметровыя гібрыдныя крокавыя рухавікі могуць выкарыстоўвацца для кіравання канвеернымі стужкамі, ліфтамі, штабелерамі і іншым абсталяваннем для дасягнення дакладнага пазіцыянавання і апрацоўкі прадметаў.
Перавага
Плыўны і дакладны рух:86-міліметровыя гібрыдныя крокавыя рухавікі могуць дасягаць плыўнага і дакладнага руху дзякуючы ўласціваму ім крокаваму разрозненню. Гэта дазваляе дакладна пазіцыянаваць і плыўна рухацца, зніжаючы рызыку вібрацый і забяспечваючы высокую якасць працы.
Высокі крутоўны момант на нізкіх хуткасцях:Гібрыдныя крокавыя рухавікі забяспечваюць высокі крутоўны момант нават на нізкіх хуткасцях, што робіць іх прыдатнымі для прымянення, якія патрабуюць моцнага ўтрымання або пускавога моманту. Гэтая характарыстыка асабліва выгадная ў сітуацыях, калі рухавік павінен утрымліваць становішча пад уздзеяннем знешніх сіл.
Шырокі дыяпазон крокавых дазволаў:86-міліметровыя гібрыдныя крокавыя рухавікі прапануюць шырокі дыяпазон крокавых дазволаў, што дазваляе дакладна кантраляваць рух. Выкарыстоўваючы тэхніку мікракрокавання, рухавік можа падзяліць кожны крок на меншыя падкрокі, што прыводзіць да больш плыўнага руху і павышанай дакладнасці пазіцыянавання.
Прастата кіравання і прывада: гібрыдныя крокавыя рухавікі маюць простую архітэктуру кіравання і прывада, звычайна выкарыстоўваючы імпульсныя і напрамковыя сігналы. Гэта дазваляе лёгка інтэграваць іх у розныя сістэмы кіравання, скарачаючы складанасць і час распрацоўкі.
Высокая надзейнасць і даўгавечнасць:86-міліметровыя гібрыдныя крокавыя рухавікі вядомыя сваёй трываласцю і працяглым тэрмінам службы. Яны могуць вытрымліваць складаныя ўмовы эксплуатацыі, такія як перапады тэмпературы і механічныя нагрузкі, без шкоды для прадукцыйнасці.
Эканамічна эфектыўнае рашэнне:Гібрыдныя крокавыя рухавікі прапануюць эканамічна эфектыўнае рашэнне ў параўнанні з іншымі тэхналогіямі кіравання рухам, такімі як серварухавікі. Яны забяспечваюць добры баланс паміж прадукцыйнасцю і коштам, што робіць іх прыдатнымі для прымяненняў, дзе важныя бюджэтныя меркаванні.
Універсальныя прымяненні:86-міліметровыя гібрыдныя крокавыя рухавікі знаходзяць прымяненне ў розных галінах прамысловасці, у тым ліку ў робататэхніцы, аўтаматызацыі, вытворчасці, 3D-друку, медыцынскім абсталяванні і іншых. Іх універсальнасць дазваляе выкарыстоўваць іх у шырокім дыяпазоне задач, якія патрабуюць дакладнага пазіцыянавання і кіравання.
Патрабаванні да выбару рухавіка:
►Кірунак руху/мантажу
►Патрабаванні да нагрузкі
►Патрабаванні да інсульту
►Патрабаванні да апрацоўкі тарцоў
►Патрабаванні да дакладнасці
►Патрабаванні да зваротнай сувязі энкодэра
►Патрабаванні да ручной карэкціроўкі
►Патрабаванні да навакольнага асяроддзя
Вытворчая майстэрня


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)